
The body of the walker is very easy to build. It's basically made of only four parts: Two Servo Motors and two AA Battery Holders.
This body is so simple that we won't have to go into such detail whith these steps.
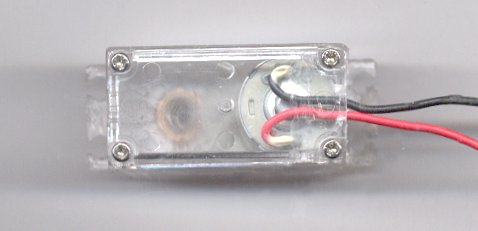
We're using Solarbotic's GM4 Servo because it comes already modified for full 360 degree rotation, and without the standard servo circuit board.
If you're starting out, I highly recommend that you buy the GM4 Servo. You can learn how to modify a servo yourself by studying Jerome Demer's excellent tutorial here.
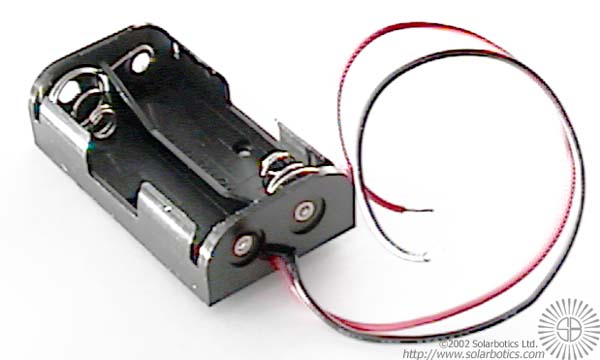
See Solarbotic's battery holders here. A power switch is optional. It's nice if you have it but if you don't, you can pop a battery in and out of the battery holder to turn it on and off.
The beauty of this design is that the body uses only the parts it needs to function. Nothing is added -- which makes for a very "clean design". You'll see what I mean when we start building it. Which is right now...
First, unscrew the top off of the Servo and switch it 180 degrees so the wire face the oposite way. (Do this with both Servos). They should look like this when you're done:
Send any questions or comments to raydiaz8@yahoo.com
Copyright © 2002 by Ray Diaz. All Rights Reserved.
BEAM Patents by Mark W. Tilden.